Multi-Robot Localization and Tracking
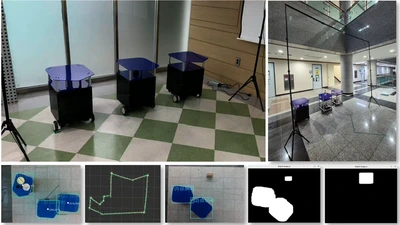
Developed a hybrid localization framework combining robot-internal EKF estimates (IMU, wheel encoder, and LiDAR) with ceiling-camera observations.
•
1 min read
Developed a hybrid localization framework combining robot-internal EKF estimates (IMU, wheel encoder, and LiDAR) with ceiling-camera observations.
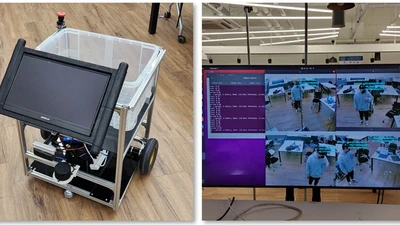
Developed a low-cost autonomous cart system with centralized multi-camera perception, camera-to-global calibration, and cart-level autonomy.