Stereo Visual SLAM Enhancement
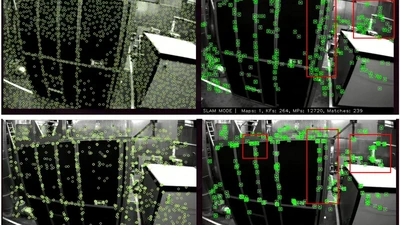
Integrated SSC-based ANMS into the ORB keypoint selection stage of ORB-SLAM3 to promote spatially balanced feature selection and improve tracking stability.
Here are projects that I have worked on over the years.
Integrated SSC-based ANMS into the ORB keypoint selection stage of ORB-SLAM3 to promote spatially balanced feature selection and improve tracking stability.
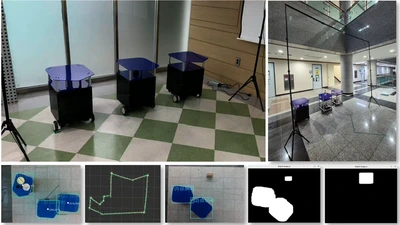
Developed a hybrid localization framework combining robot-internal EKF estimates (IMU, wheel encoder, and LiDAR) with ceiling-camera observations.
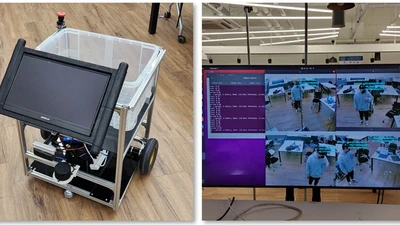
Developed a low-cost autonomous cart system with centralized multi-camera perception, camera-to-global calibration, and cart-level autonomy.