
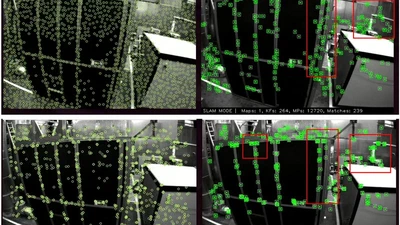
Visual SLAM Enhancement
Integrated SSC-based ANMS into the ORB keypoint selection stage of ORB-SLAM3 to promote spatially balanced feature selection and improve tracking stability.
•
1 min read
M.S. in Artificial Intelligence
2025-03-02
Ulsan National Institute of Science and Technology (UNIST)
B.S. in Robotics
2019-03-02
2024-08-31
Hanyang University ERICA
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026
CVPR Highlight
Institute of Control, Robotics and Systems (ICROS), 2024
Undergraduate Student Paper Award
Ulsan National Institute of Science and Technology (UNIST)
Ulsan National Institute of Science and Technology (UNIST)
Hanyang University ERICA
Integrated SSC-based ANMS into the ORB keypoint selection stage of ORB-SLAM3 to promote spatially balanced feature selection and improve tracking stability.
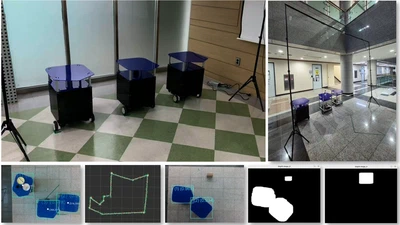
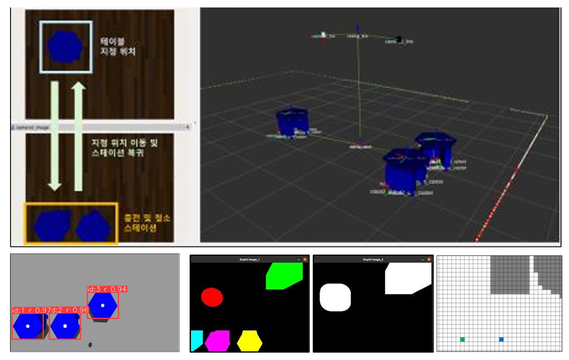
Developed a hybrid localization framework combining robot-internal EKF estimates (IMU, wheel encoder, and LiDAR) with ceiling-camera observations.